
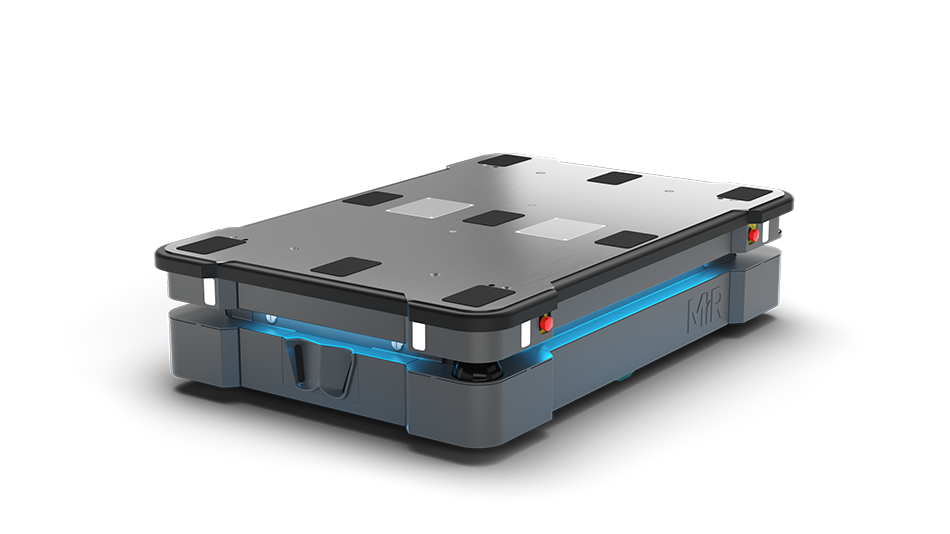
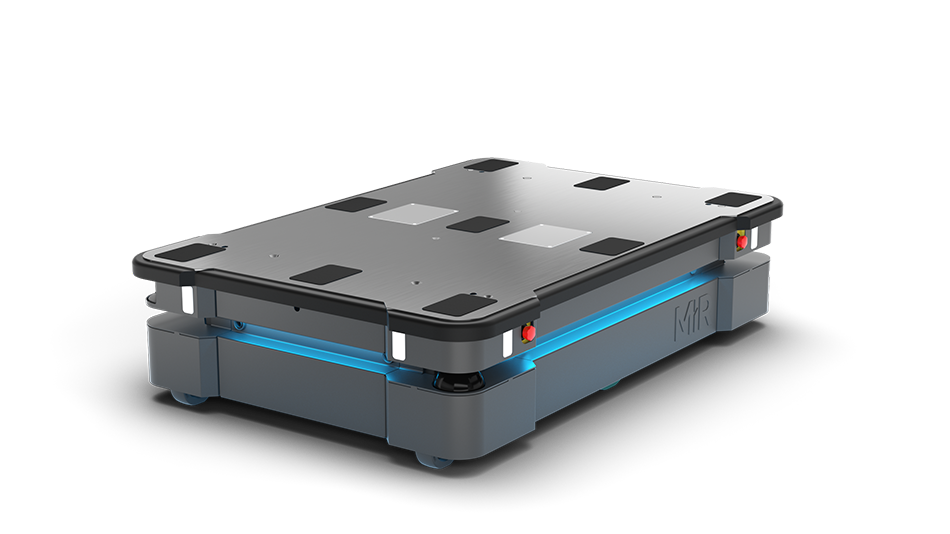
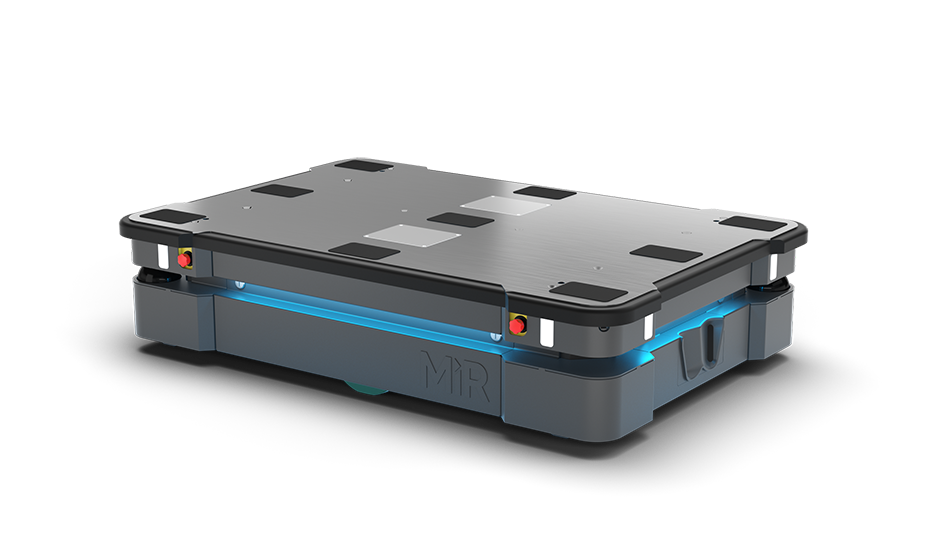
MiR600은 더욱 강력하고 안전한 자율 주행 로봇(AMR)입니다. MiR600은 최고 수준의 로봇 표준을 준수하므로 시중의 타사 AMR들을 능가합니다.
(MiR600) 관련한 퀵 팩트

최대 속도

최대 적재량에서 배터리 지속 시간

적재량

크기
안전하고 효율적인 기동
협동로봇 MiR600은 사람과 장애물 주위를 안전하게 이동합니다. 이 로봇은 최신 기술과 첨단 소프트웨어로 자율 주행하며 목적지까지 가장 효율적인 경로를 찾아냅니다. 장애물을 만나면 물류 프로세스 지연으로 비용이 발생하지 않도록 경로를 자동 변경합니다.
MiR600은 360도 시야를 확보하는 최신 레이저 스캐닝 기술로 안전을 최적화합니다. 3D 카메라는 바닥으로부터 30~1800mm 높이의 팔레트를 감지할 수 있습니다.
시설 레이아웃 변경 없이 팔레트 운반 최적화
MiR600 Pallet Lift를 사용하면 MiR600이 팔레트를 자율적으로 픽업, 이송, 하적하므로 직원은 더 가치 있는 작업을 수행할 수 있습니다. 첨단 주행 소프트웨어가 전선, 자석 또는 QR코드의 기능을 대체하므로, MiR600 작동을 위해 시설 레이아웃을 변경할 필요가 없습니다. 시설의 CAD 파일을 로봇에 다운로드하거나 레이저 스캐너로 지도를 만들기만 하면 됩니다. 이를 통해 빠르고 비용 효율적인 구현이 가능합니다.
강력한 산업용 로봇
MiR600은 미르의 다른 산업용 로봇인 고강력 MiR1350과 더불어 업계 최초의 IP52 등급을 받은 AMR입니다. 먼지 입자 및 유체에 대한 내성이 강화되어 더 다양한 환경에서 주행 로봇을 사용할 수 있습니다. 예를 들어, 개방된 문 근처나 물과 먼지가 많은 기타 장소에서도 운행할 수 있습니다.
높은 사용자 친화성 및 유연성
사용자 친화적인 MiR600은 처음부터 완벽하게 제어할 수 있습니다. MiR600은 스마트폰이나 태블릿, 컴퓨터를 이용해 직관적인 MiR 로봇 인터페이스로 제어할 수 있으며, 경험이 전무해도 프로그래밍할 수 있습니다. 또한 로봇을 기존 ERP 시스템에 통합하여 완전 자동화 솔루션을 구현할 수 있습니다.
다양한 상단 모듈을 쉽고 빠르게 통합하는 기능을 이용해, MiR600에 팔레트 포크, 컨베이어, 로봇 암 또는 기타 옵션을 장착하여 광범위한 애플리케이션을 지원할 수 있습니다.
| 지정된 용도 |
무거운 화물 및 팔레트의 내부 운송을 위한 자동 모바일 로봇(AMR) |
| 색상 |
RAL 7011 / 아이언 그레이 |
| 고지 사항 |
사양은 현지 조건 및 애플리케이션 설정에 따라 다를 수 있음 |
| 길이 | 1 350 mm |
| 너비 | 910 mm |
| 높이 | 322 mm |
| 무게 | 243 kg |
| 지상 간격 | 27 mm |
| 적재면 | 1 304 x 864 mm |
| 최대 적재량 | 600 kg |
최대 속도 | 2.0 m/s (7.2 km/h) |
| 로봇 두 대 통과 시 작동 복도 너비 | 기본 설정 시: 4 250 mm 최소 풋프린트 및 보호 필드 차단 제공: 2 700 mm |
| 배치 정확도(제어된 조건에서) | VL-마커에 도킹: ± 2 mm X-축 상, ± 3 mm Y-축 상, ± 0.25° 각도 |
| 횡단 가능한 틈새 허용오차 | 30 mm 미만 |
| 최대 적재 시 활성 작동 시간 | 최대 8시간 30분 |
| 적재하지 않았을 때 활성 작동 시간 | 최대 11시간 |
| 대기 시간(로봇이 켜져 있으나 유휴 상태) | 최대 16시간 |
| 배터리 유형 | Li-NMC, 47.7 V, 34.2 Ah |
| 충전비 | 최대 1:12(10분 충전 시 최대 페이로드 기준 2시간 런타임) |
| 충전 전류 | 최대 35A |
| 완충 주기 수 | 최소 3,000주기 |
| 환경 | 실내 전용 |
| 주변 온도 범위, 작동 | 5 ~ 40°C |
| 습도 | 10 ~ 95%(비응결) |
| IP 등급 | IP 52 |
| 바닥 조건 | 물, 기름, 오물 없음 |
| EMC | EN61000-6-2, EN61000-6-4, (EN12895) |
| 산업용 차량의 안전 표준 | CE, EN1525, ANSI B56.5, ISO3691-4, RIA15.08, ISO13849-1 |
| 안전 기능 | ISO 13849-1에 따른 12가지 안전 기능. 안전 기능이 트리거되면 로봇이 정지됨. |
| Wi-Fi | 2.4 GHz 802.11 g/n, 5 GHz 802.11 a/n/ac. |
| I/O 연결 | 4개의 디지털 입력, 4개의 디지털 출력, Modbus 프로토콜을 사용하는 1개의 이더넷 포트 |
| SICK 안전 레이저 스캐너 | 2개의 microScan3(전면 및 후면) 360° 로봇 주변 시각 보호 제공 |
| 3D 카메라 | 2개의, 3D 카메라 Intel RealSense™ D435 |
| 근접 센서 | 8개 |
| 오디오 | 스피커 |
| 신호 및 상태등 | 사면의 표시등, 신호등 8개(각 모서리에 2개) |