
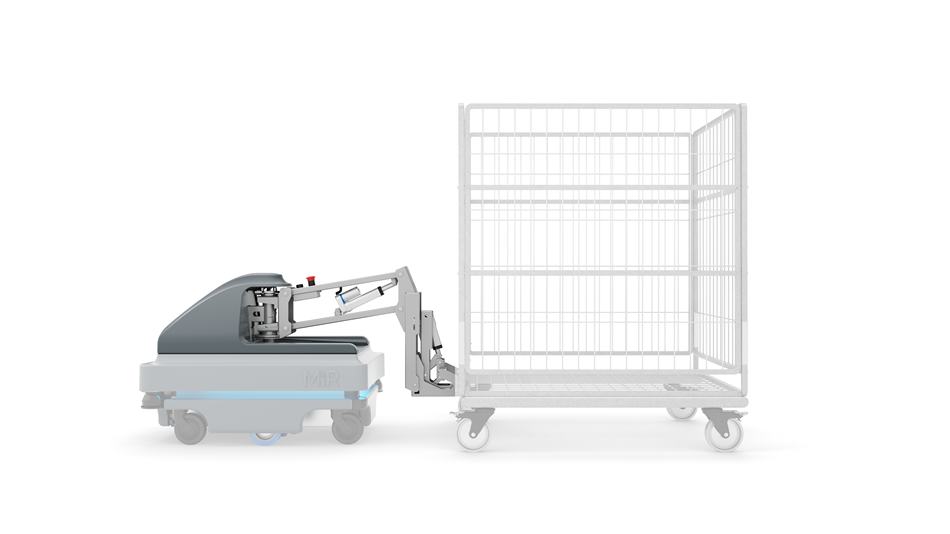
MiR Hook 250
견인을 위한 향상된 소프트웨어와 보다 빠르고 민첩한 로봇 베이스를 갖춘 이 솔루션은 동적 공장 배치 구조의 필요에 맞도록 개발되었습니다.


광범위한 견인 작업에 이상적
MiR Hook 250 TM은 제조 설비나 창고에서 무거운 제품을 효율적으로 이송하거나 병원에서 린넨이나 음식 카트를 이송하는 것과 같은 광범위한 견인 작업에 이상적입니다. MiR250 Hook는 최대 500 kg의 하중을 이송하며, 무겁거나 부피가 큰 화물을 위한 새로운 내부 물류 옵션을 제공합니다.
사람들을 피해 안전하게 기동
MiR Hook 250 TM에서는 손쉽게 카트를 측정하고 해당 데이터를 소프트웨어에 제공할 수 있습니다. 내장 센서, 카메라, 정밀 소프트웨어를 갖추고 있어 MiR Hook 250 TM으로 카트를 끄는 로봇은 사람과 장애물 사이를 안전하게 기동하거나 램프 위를 통과할 수도 있습니다.
향상된 소프트웨어와 로봇 베이스
MiR250 Hook는 최적의 결과를 위해 최신 소프트웨어를 적용하고 있습니다. 이 MiR250 Hook 조합은 향상된 소프트웨어와 강력한 로봇 베이스 덕분에 더욱 민첩하게 움직일 수 있어, MiR250 Hook를 성능, 정밀도, 생산성에 있어 보다 향상된 AMR 솔루션으로 만들어 줍니다.
향상된 소프트웨어와 로봇 베이스
MiR250 Hook는 최적의 결과를 위해 최신 소프트웨어를 적용하고 있습니다. 이 MiR250 Hook 조합은 향상된 소프트웨어와 강력한 로봇 베이스 덕분에 더욱 민첩하게 움직일 수 있어, MiR250 Hook를 성능, 정밀도, 생산성에 있어 보다 향상된 AMR 솔루션으로 만들어 줍니다.
| 지정된 용도 | 중소규모 화물의 내부 운송을 위한 자동 모바일 로봇(AMR) |
| 색상 | RAL 7011 / 아이언 그레이 |
| 고지 사항 | 사양은 현지 조건 및 애플리케이션 설정에 따라 다를 수 있음 |
| 길이 | 1,130 ~ 1,220 mm |
| 높이 | 645 ~ 895mm |
| 너비 | 580 mm |
| 지상 간격 | 28mm |
| 무게 | 202kg |
| MiR250 포함 무게(배터리 또는 적재물 제외) | 188kg |
| 최소 견인 하중 | 500kg |
최대 속도 | 2.0 m/s (7.2 km/h) |
| 작동 복도 너비 | 기본 설정 시: 2 250 mm |
| 로봇 두 대 통과 시 작동 복도 너비 | 기본 설정 시: 3 600 mm 개선된 설정 시: 3 000 mm |
| 배치 정확도(제어된 조건에서) | VL-마커에 도킹: ± 3 mm X-축 상, ± 3 mm Y-축 상 |
| 횡단 가능한 틈새 허용오차 | 최대 20mm |
| 작동 출입구 너비 | 기본 설정 시: 1 700 mm |
| 최대 적재 시 활성 작동 시간 | 최대 10시간 |
| 적재하지 않았을 때 활성 작동 시간 | 최대 14시간 |
| 대기 시간(로봇이 켜져 있으나 유휴 상태) | 최대 21시간 |
| 최대 경사 | 300 kg 적재량 시 감소한 속도 기준 ± 5% |
| 배터리 유형 | |
| 충전비 | 최대 1:16(10분 충전 시 최대 페이로드 기준 2시간 40분 런타임) |
| 충전 전류 | 최대 35A |
| 완충 주기 수 | 최소 3,000주기 |
| 환경 | 실내 전용 |
| 주변 온도 범위, 작동 | 5 ~ 40°C |
| 습도 | 10 ~ 95%(비응결) |
| IP 등급 | IP 21 |
| 바닥 조건 | 물, 기름, 오물 없음 |
| 안전 기능 | ISO 13849-1에 따른 8가지 안전 기능. 안전 기능이 트리거되면 로봇이 정지됨. |
| SICK 안전 레이저 스캐너 | 2개의 nanoScan3(전면 및 후면) 360° 로봇 주변 시각 보호 제공 |
| 3D 카메라 | 2개의, 3D 카메라 Intel RealSense™ D435 후크: 카트 감지를 위해 1개의 Intel RealSense D435 역방향 |
| 근접 센서 | 8개 |
| Wi-Fi | 2.4 GHz 802.11 g/n, 5 GHz 802.11 a/n/ac. |
| I/O 연결 | 4개의 디지털 입력, 4개의 디지털 출력(GPIO), 1개의 이더넷 포트, 1개의 보조 비상 정지 |
| 신호 및 상태등 | 사면의 표시등, 신호등 8개(각 모서리에 2개) |
